
本文参考的是赵虚左老师的博客以及视频。
1. 安装虚拟机
需要下载的软件:VxWork或者vmware以及ubuntu虚拟机镜像,ubuntu镜像学习使用的版本是20.04。虚拟机的安装步骤比较简单,网上有很多参考,这里略过不写。
2. 安装ROS
2.1 配置ubuntu的软件和更新

需要保证途中的复选框都勾选上,且下载自那个地方要选择一个国内的服务器。
2.2 设置安装源
- 默认的安装源:
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
- 国内清华的安装源:
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
- 国内中科大的安装源:
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
2.3 设置ROS的key
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
2.4 更新源
sudo apt update
2.5 安装ROS
sudo apt install ros-noetic-desktop-full
这个安装过程受限于网络环境和网络速度,过程可能比较漫长,而且过程中还可能会报错,如果报错了就重新执行这条命令,它会从错误的地方开始继续安装,不会从头安装。需要耐心等待。
2.6 配置环境变量
1 | echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc |
3. ROS依赖安装
- 首先安装构建依赖的相关工具:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
- 初始化rosdep
1 | sudo rosdep init |
如果一切顺利的话:

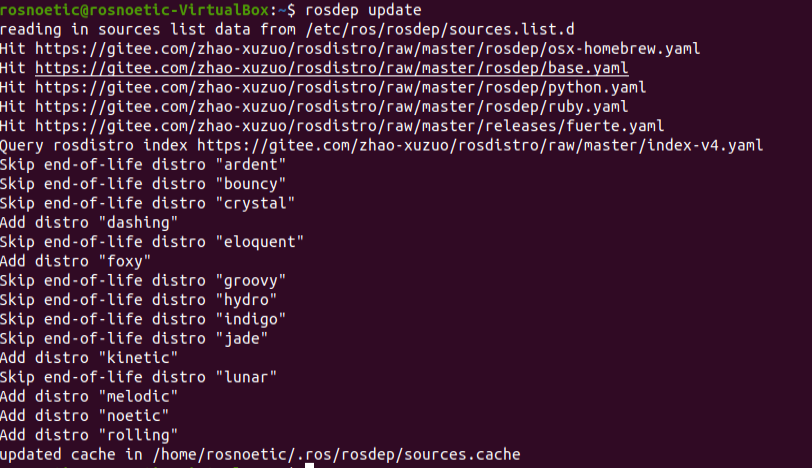
但是一般都会在rosdep update这一步出错,在这一步,如果能翻墙的话可以翻墙后重复执行一直到成功,如果不能翻墙,则参考赵虚左老师的方法:http://www.autolabor.com.cn/book/ROSTutorials
4. 验证环境
- 开启三个终端(ctrl+shift+t可以打开一个终端);
- 终端1输入指令:
roscore;开启ROS核心控制器 - 终端2输入指令:
rosrun turtlesim turtlesim_node;开启乌龟控制图形界面 - 终端3输入指令:
rosrun turtlesim turtle_teleop_key;开启获取键盘鼠标的ros程序 - 将鼠标光标放置终端3窗口,然后按下键盘的上下左右键,如果能控制乌龟则说明ROS环境搭建完成;


- 本文作者: 摘星星的小朋友
- 本文链接: http://slhking.github.io/2022/04/22/ROS-1-SetupEnv/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!